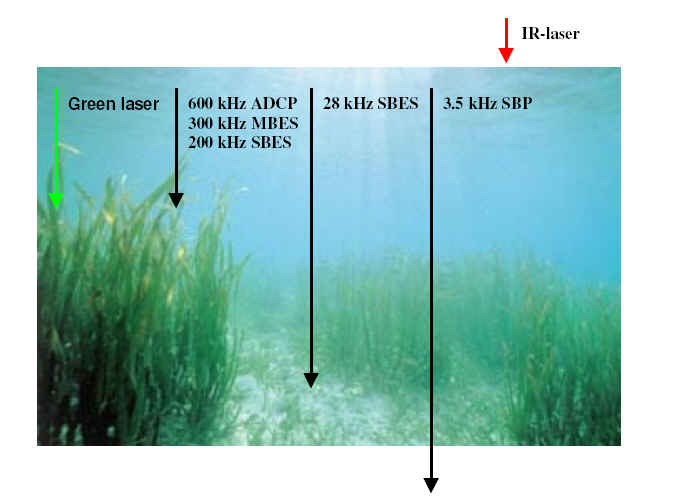
The research comprises bathymetric measurements with various acoustics and LIDAR in a vegetation contaminated area. The bottom tracking ability depends heavily on the penetration of the signal frequency. High frequencies have greater difficulty to propagate through a water mass or vegetation which will constrain the bottom tracking ability but also detect mid water layers.
The ship based data will be collected with the CSL Heron:
Single beam echosounder (200 & 28 KHz)
Sub bottom profiler (3.5KHz)
The LIDAR principle is based on a comparison of the water surface reflected infra red laser and the bottom reflected green laser. The high frequency green laser (532nm) will probably not track the bottom with the presence of algal growth. The ADCP and multibeam frequencies shall have a similar effect. Low frequency bathymetric data will not have these difficulties and act as reference. An aiding tool with the assessment of bottom tracking will be the new watercolumn imaging capability of the EM3002 and towed video images.
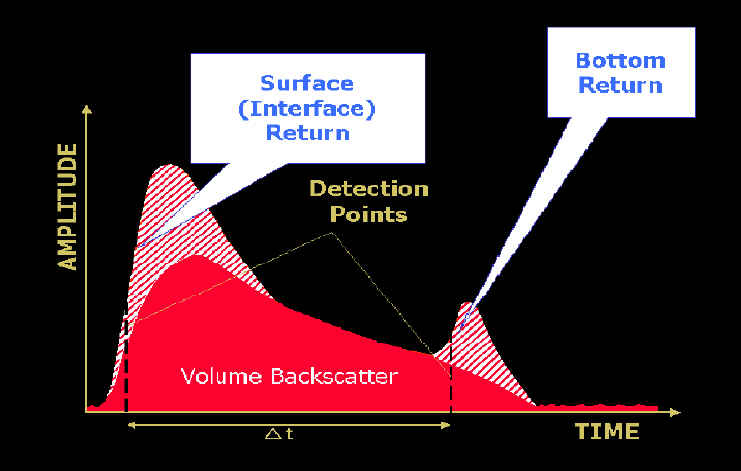
The figure below shows the intensity plot of the LIDAR green laser strike. The first peak is the result of the water surface. The second, considerably weaker peak, comes from reflection with the bottom. One of the aims of this research is to characterize this "bottom" hit signature for cases of algae presence and the true bottom.
The data is to be collected in June 2006 at Bay Chaleur, north of New Brunswick, Canada.
The image below is multibeam data collected by CHS near Sidney (BC). It clearly illustrates the presence of algae in the watercolumn. We expect to get similar results in Bay Chaleur.
Nov. 2005 PK